Projects
*
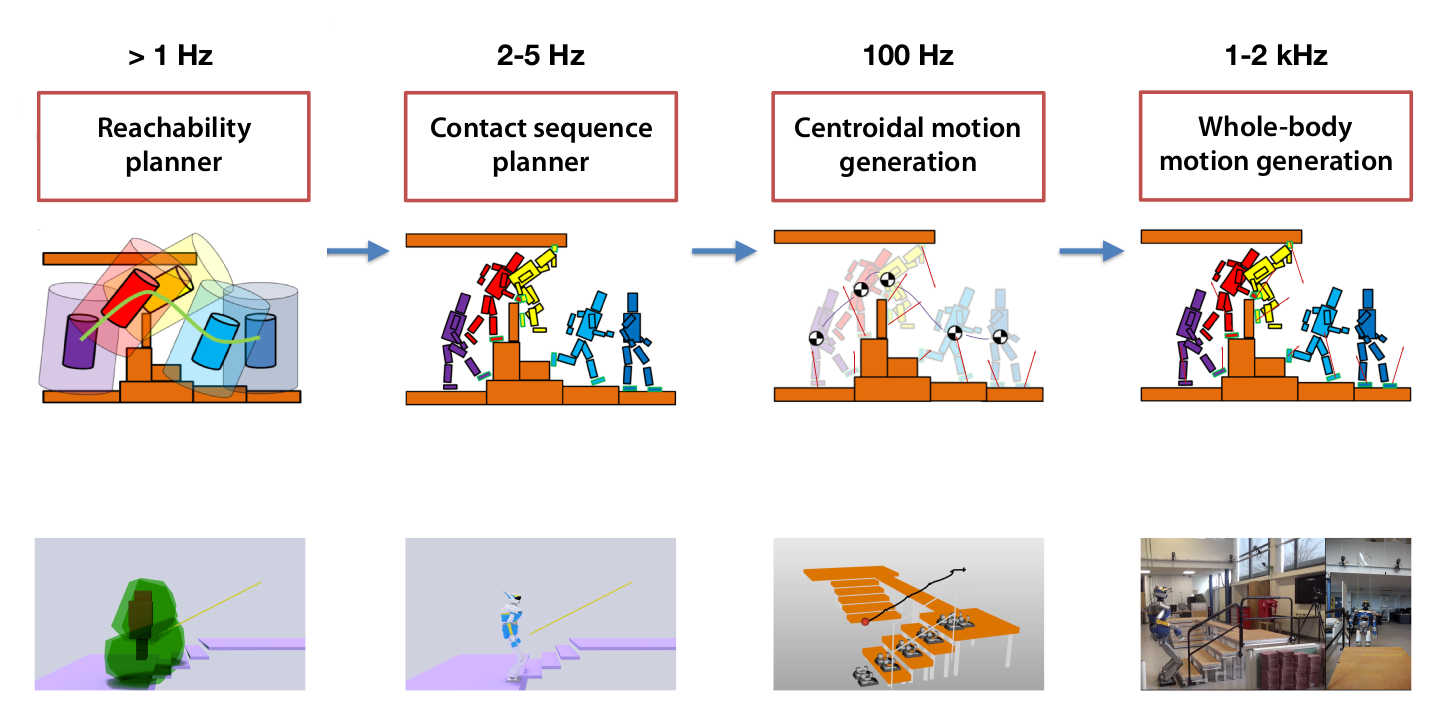
Loco3d
A fully automatic pipeline for multicontact locomotion on uneven terrains.
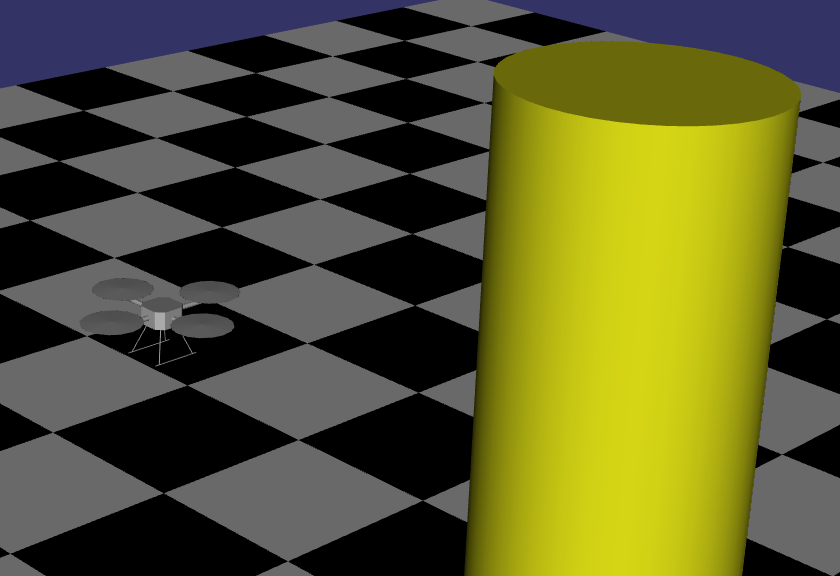
UAVs Teleoperation
M. Eng. student project aiming to build a safe teleoperation system for UAVs using Optimal Control an obstacle constraints.