The Loco3d project is a project developed in the Gepetto team that aims to build a full pipeline to generate locomotion movements in a complex environment. Such pipeline have been also seen in the case of a quadruped robot for the DARPA Learning Locomotion project.
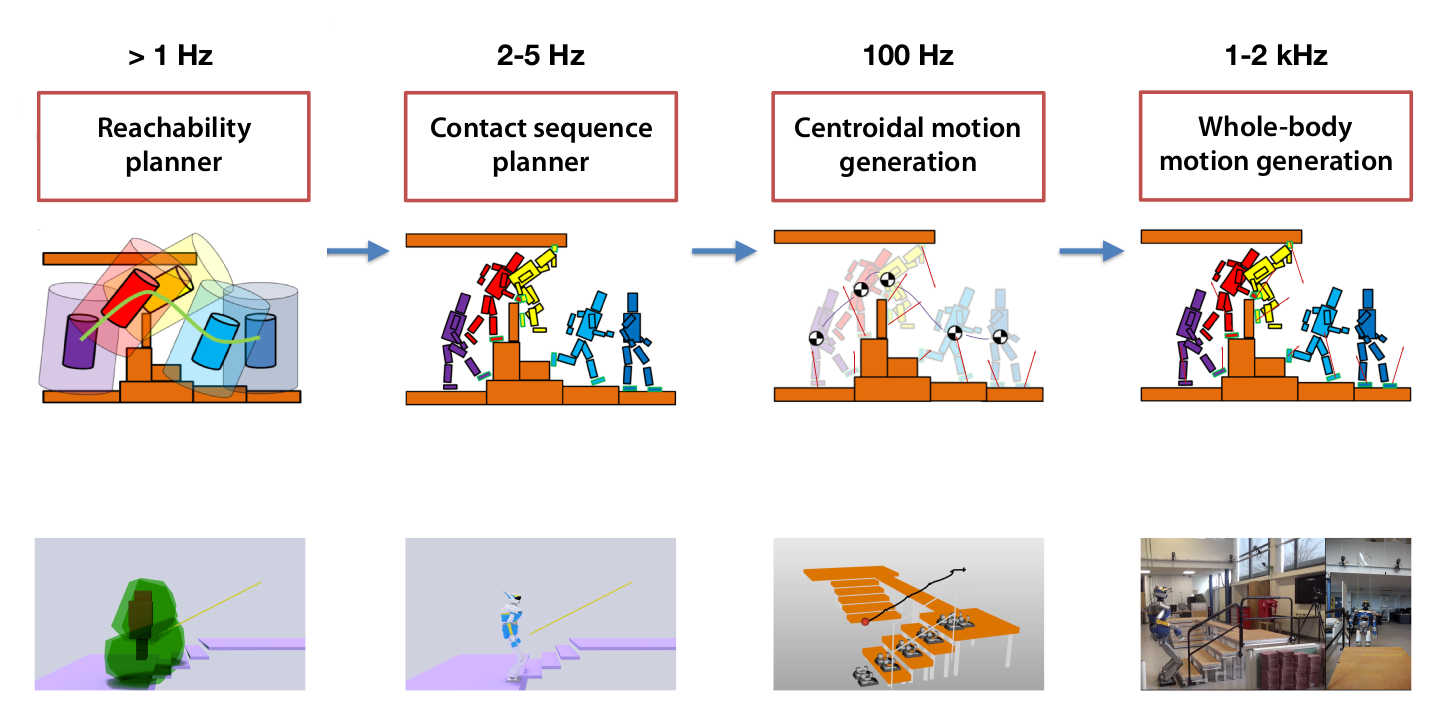
To overcome the different difficulties of humanoid locomotion, the locomotion problem is solved with a succession of planners/controllers:
- Planning of an approximate path for the center of the robot.
- Planning of the contacts.
- Planning of a precise trajectory for the center of mass.
- Control of all motors.
RSS Workshop on Challenges in Dynamic Legged Locomotion, Jul 2017